Introduction
In this document, we present the results of test measurements of the messaging transport system of JADE The results of message round-trip measurements for several platform and load configurations, and different MTPs are then presented and analyzed. The obtained results show that JADE well performs in scalability in several scenarios (intra- and inter-platform).
1.
JADE
Messaging Architecture
A
JADE platform is a distributed environment composed of several run-time containers
launched over one or more hosts across a network (figure 1). In the platform,
an important role is played by the Main Container where the FIPA service
agents live (i.e. the AMS and the DF agent). The GUID (Global Unique
IDentifier) is the logical reference of an agent, independent to the agent
location, that is used into the ACLMessage and then resolved by the platform
into a physical address transparently to the programmer.
For
a better understanding of JADE messaging architecture (figure 2), we
distinguish between intra-platform and inter-platform agents
communication.
The
first case involves agents living in the same platform and JADE uses its
internal message transport protocols (IMTPs) for implementing delivery
services. JADE delivers messages as follows:
using
event passing when both the sender and the receiver agents live in the same
container. That implies also that the message is not serialized, but cloned,
and the new object reference is passed to the receiver;
ü
using
RMI for inter-container communications, i.e. when sender and receiver live in
different containers.
Figure 1: A JADE platform
In
the inter-platform scenario, interaction among agents is achieved by the Agent
Communication Channel (ACC), which is physically distributed across all the
containers of the platform. In fact, each container can be launched with one or
more message transport protocols (MTPs) and the entire platform is able to
internally route the messages and select the best MTP (which might be even on a
different container) for each situation. The following MTPs are currently available
for JADE:
ü
CORBA
IIOP MTP based on standard Sun ORB provided with the JDK. (the default
installation)
ü
CORBA
IIOP MTP based on ORBACUS [7].
ü
HTTP-based
MTP.
JADE provides a Java interface both for implementing
new ad-hoc IMTP and MTP. An
alternative IMTP, for example, has been implemented for JADE integrated with LEAP in order
to provide inter-container communication in wireless environments, where RMI is not available.
A
requirement for JADE was to avoid the main container to be a bottleneck for
messaging and platform management. Thus the ACC is distributed and MTPs are
“pluggable” to any container, not necessarily “Main Container”. Also very
important is the cache in any container for mapping a GUID with a physical
address. The main container is the only one that has got the complete
GUID-physical address association for the whole platform, and it is contacted
by the other containers only in a cache-miss case, that happens only the first
time a message is sent to a certain agent on a different container. JADE
performs all that transparently to the programmer, and the caching mechanism
provides good performance, as also shown by the present work.
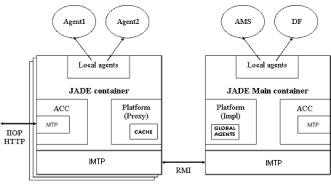
Figure
2: Components of
Jade Messaging Architecture
2. TEST DESCRIPTION
2.1 Goal
We intend to evaluate the performance of the JADE
messaging subsystem for typical configuration scenarios.
2.2 Testbed
We measured the roundtrip time defined as the required time for a circular exchange of an ACL message between a Sender agent and a Receiver agent.
In order to evaluate the scalability of the platform, we started with a single couple Sender/Receiver, then we increased the number of couples and observed how the roundtrip time grows.
For each measurement we want to obtain the avgRTT (average roundtrip time) defined as the total measurement time divided by the number of times a message is exchanged for each couple and by the number of couples. In other terms, avgRTT is the average time needed to send a message and receive the reply.
Figure
3: ACL message
round trip
As shown in Figure 4, the Sender i-th communicates only with Receiver i-th, every couple exchanges 10000 messages. The content field of each message is filled with a string of 7 characters.
Both
agents are implemented by using the CyclicBehaviour class (the JADE
abstraction for a repetitive cyclic agent task) to handle incoming messages. In
detail, the steps executed by
the two agents, sender and receiver, are the following:
The
Sender agent that has the initiator role:
Sender:
Create a message to send
Take start time
For all number of message to send
Send message to receiver
Wait the reply message from receiver
Take finish time
The
Receiver agent has responder role:
Receiver:
wait the message from sender
send the reply message back to sender
Figure 4: Testbed Architecture
2.3
Scenarios
The measurement is repeated for several configurations, with the agents situated into the same platform or in different platforms. So, we distinguish between:
§ intra-platform communication
§ inter-platform communication
When all agents run into a single platform, we
have two sub-cases:
§ Communication between agents both
living in the same container
§ Communication between agents living
in two different containers.
2.4
Measurement
issues
2.4.1 Time measurements in Java
In order to measure time intervals we used the Java method: long System.currentTimeMillis(), that returns the number of milliseconds passed since 1st Jan 1970, as common in Unix systems. Different JVM implementations can provide different precision levels. Sun SDK 1.4 on Windows 2000, for example, provides a precision of 10ms.
Since the duration of our phenomena is in the order
of magnitude of milliseconds, we need to measure the roundtrip time as average,
taking the time of a message to complete N roundtrips, and dividing it by N.
The value of N has to be chosen high enough so that the measurement error
introduced by Java does not influence our measurement.
2.4.2 Measurement at “Full Load”
During a measurement we can identify three intervals, as shown in Figure 5. Na(t) is the number of active agents and N is the total number of agents.
During T1 all the agents are sequentially created (and start competing for the CPU), and after a little while (thicker line) they actually start exchanging ACL messages. In this phase two different phenomena can be experienced that tend to distort the measurements: the measured avgRTT tends to be lower (i.e. faster exchange) than reality because not all the couples are born yet; the avgRTT tends to appear higher (i.e. slower exchange) because agent’s creation takes CPU.
During the interval T2 all the couples are created and are ready to exchange messages.
In the T3 phase the measurement is again influenced by the lower number of agents competing for the CPU, and by the agent destruction time, similarly to the T1 phase. We want to focus on the messaging subsystem performance, so other effects on avgRTT should not be taken into account. Otherwise we would include someway the agent creation/destruction performance in the avgRTT measurement.
Figure 5: Na(t) is the number of active agents during the three considered
intervals. The thicker line shows the number of agents that are actually
sending messages.
Given the aforementioned, for each couple we measure the avgRTT only during the interval Tm when the system is working at “Full Load” i.e. all the couples are actually exchanging messages. In particular we make Tm last until 10000 messages are exchanged. The algorithm has been implemented so that a couple, after taking the “finish time” at the and of Tm, does not stop exchanging messages in order to keep the “Full Load” condition for the other couples that are still working in the Tm phase. The program stops as soon as all the couples completed the Tm interval. This has been implemented by using a static variable in the Sender class, incremented by each agent when starts sending messages. By doing that, each sender knows how many couples are actually sending messages.
It has been verified that values obtained with the mechanism we used, are actually different than calculating the avgRTT as the total time (T1+ T2+ T3) divided by (exchanged messages * number of couples).
2.4.3 Just-in-Time compilation effects
The JVM we used (Sun SDK 1.4) offers, as default, the HotSpot technology, that provides a “Just-in-Time” compilation. Most used parts of code are compiled at run-time by the JVM to native code, in order to speed up their execution.
Running a roundtrip time measurement with 50 couples of JADE agents, with JIT (as default) or disabling it (-Xint option), for 10000, 30000 and 50000 trips, we obtained these values:
|
#
Trips |
10000 |
30000 |
50000 |
|
With JIT |
13,4 |
11,9 |
11,6 |
|
NO JIT (-Xint) |
64,1 |
63,9 |
63,8 |
Table
1: Measured values
of avgRTT for different numbers of trips (times a message
is exchanged) for each couple. Considered 50 couples, values in ms.
The
variations between 10000 and 50000 trips are:
With JIT: -12,9 % NO JIT: -0,5 %
The
first value shows that the performance improvement due to the JIT compilation
is higher for longer measurement. This is because at the beginning the compiler
takes time (and CPU) to produce native code, but in the long run this becomes
more and more convenient because the compilation overhead is spread over a
longer period of time. On the other hand, without JIT compilation, as we
expected, the avgRTT doesn’t vary significantly with the number of trips.
Another consideration is the big performance improvement due to the JIT
compilation for our testbed.
In
order to make the results comparable, we run all the measurements with 10000
trips for each couple of agents, without disabling the JIT compilation.
2.5
Hardware
& software configuration
We
used two HP VECTRA personal computers connected by a 100Mbit/s Ethernet LAN.
The two hosts were in a proper VLAN so that the network traffic generated by
other host did not affect the measures. The following table provides
information, obtained with MS System Info, which shows the characteristics of
the two PCs.
|
Model |
HP
Vectra |
|
Processor |
x86
Family 6 Model 8 Stepping 6 GenuineIntel ~800 MHZ |
|
BIOS
version |
PhoenixBIOS
4.0 Release 6.0 |
|
Total
memory |
256
MB |
|
Operating
System |
Microsoft
Windows 2000 Professional |
|
OS
version |
5.0.2195
Service Pack 1 Build 2195 |
|
Java |
Sun
SDK 1.4 |
|
JADE |
2.5 |
Table
2: Hardware and
Software testbed configuration
3.
EXPERIMENT
RESULTS
3.1 JADE
3.1.1 Intra Platform
In this section we present the measured round-trip time, when the agents run in the same platform. There are three result sets, as shown in Figure 6, one for each configuration:
§ One container
§ Two containers on the same host
§ Two containers on two different hosts
All the following figures are in milliseconds and showed low standard deviations during the tests. For every graph, the X axis contains the number of couples and the Y axis the related average roundtrip time (avgRTT) expressed in milliseconds (ms).
At first glance, we can see that the avgRTT measured when the agents run into same container is very low, indeed JADE optimizes on agents localization and uses event passing when the agents are in the same container. Furthermore, the middleware showed a linear growth of the roundtrip time as function of the number of couples in all cases, in the considered range.
Figure 6: Round Trip time - Intra Platform
communication
When the communication happens between agents on two different containers, JADE uses RMI to send the messages. Roundtrip time for the two hosts configuration results lower than the 1-host case because the computation load is split between two CPUs.
The low growth rate of avgRTT for the same container configuration, compared to the other cases, shows that the messaging architecture of this middleware can support high load, without heavy performance degradation.
3.1.2 Inter Platform
The graph in Figure 7 shows the roundtrip time between agents on different platforms, each living on a different host.
Figure 7: Round Trip Time -Inter
Platform communication.
Since
it is possible to change transparently the Message Transport Protocol (MTP), we
have compared the results obtained by using the ORB produced by Sun
Microsystems to ORBacus produced by IONA without affecting in any way the
agents’ code. The results show that ORBacus performance are slightly
better.
JADE
uses MTPs that are compliant to FIPA specifications. This implies that JADE for
inter-platform communication has to add an envelope to the message, code it via
StringACLEncoding before delivering and then parse it at the receiver side.
Considered that the roundtrip time for inter-platform scenario is very similar
to the intra-platform one, the FIPA-MTP based upon IIOP has good performance
and JADE implementation of the FIPA specifications is very efficient.
3.1.3
Intra
Platform and Inter Platform
Comparing
the results for the two containers on two hosts configuration, to the case with
two containers belonging to different platforms on two hosts, we can see that
performance are similar (Figure 8).
Figure 8: Comparison between 2 Container and 2 Platform communication
Multi
agent systems are considered to be a valuable technology for integrating
loosely coupled systems, like information systems of different departments or
B2B process integration. This kind of applications requires agents on different
platforms that might be under the control of different organizations, to
interact efficiently. Since JADE inter-platform communication performs as well
as the intra-platform one, the middleware can be efficiently used as enabling
technology for these scenarios.
3.1.4 Comparison with a RMI implementation of the testbed
As
term of comparison we implemented a version of the testbed by using RMI without
the facilities offered by the JADE middleware. In more details, we set up this
implementation for two main reasons:
·
have a
baseline for appreciating the values of the reported absolute times, based upon the most used JAVA
features for agent implementation, like multithreading and Java-RMI;
·
try to
understand the overhead introduced by the standard JADE IMTP in respect to its
underlining technology.
The implementation is composed of
two agent classes that are substantially Java remote objects with an active
thread (Figure
9). In order to perform the circular exchange of
messages, each agent has a message queue and a thread that monitors its queue.
When the thread is notified that there is a message in the queue, it calls a
remote method on the other agent with an ACL message object as parameter, in
order to fill the queue of the counterpart. This loop is repeated several times
to get the avgRTT.
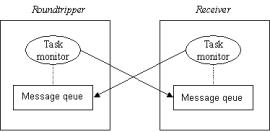
Figure 9: Implementation of the RMI
testbed
We have considered two scenarios: “agents” on the same java virtual machine and “agents” on two different hosts. These two configurations show the effect of using the same transport mechanism for communication between agents that are near or far. “Near” means that agents run in the same JVM/Host and “far” means that they are executing on different ones. Active objects on the same JVM, communicate always through RMI, and don’t take advantage of agents’ locality.
The obtained results (Figure 10) show how better is JADE in exploiting the locality of the communication in respect to the RMI implementation of the testbed. Application developers can take advantage from that, getting better performance by grouping in the same container agents that need to interact a lot. Agent mobility can be also used for dynamically grouping agents at run-time.
Figure 10: Comparison for “near” agents
Considering agents on two different hosts, JADE shows higher roundtrip time (Figure 11), but still has the same order of magnitude. This is due to the higher level of abstraction introduced by the middleware to support message routing based on agent unique identifiers, encoding of ACL message (as request by FIPA specification) and the possibility to use other internal message transport protocols than RMI. Our RMI testbed implementation simply relies on rmiregistry to locate the agents.
It is worth to notice that this overhead introduced by JADE is well balanced by the fact that the JADE platform hides to the developer all tedious issues of dealing with remote method calls and interfaces, thread synchronization, resulting in a shorter development time.
Figure 11: Comparison for “far” agents
4.
CONCLUSION
We
developed a simple testbed in order to evaluate performance and scalability of
JADE messaging subsystem. Specifically, we measured the average roundtrip time
for a message exchange between a couple of agents. The algorithm we used and
some measurement issues were described. The results of measurements made using
several configuration scenarios, both intra- and inter- platform, were
analysed. In order to have a term of comparison, some of the obtained results
were compared to the performance of an implementation of the testbed based on
agents as simple “active objects” communicating through RMI.
We
found that, in the considered range, JADE scales linearly, equally well in all
the configuration scenarios, and its scalability is similar to RMI when agents
are distributed across the network.
JADE
messaging performance, when both sender and receiver agents live in the same
container, are very good and much superior compared to those provided by the
RMI experiments (see Figure 10). On the other hand, JADE inter-container communication
provides performance comparable with pure RMI with an overhead well balanced by
the benefits of a shorter development time and ease of use.
Communication
between different platforms, via the IIOP-MTP, does not suffer any performance
degradation, and enables an efficient integration of Multi-MAS. In fact, the
measured values are comparable to JADE inter-container transport based on RMI.
Furthermore, it has been easy to change message transport protocol for
inter-platform communication, plugging-in a different MTP, without affecting
the testbed code.
We
also measured a little performance improvement from Sun ORB implementation to
Iona ORBacus.
Locality of agents allows an efficient MAS deployment improving messaging performance by distributing properly the agents into containers at design time or, by using intra-platform agent mobility provided by JADE, also at run-time.
Finally, these measurements showed good JADE message system performance, and highlighted that it is a good candidate for developing heavy-load distributed applications.
All the source code of the performed tests can be downloaded from the official JADE web site. [2]
Tests will be extended as future work to evaluate other MTPs, in particular the HTTP-based, and to finalize some specific design choices of JADE, such as cooperative scheduling of the agent tasks (i.e. the behaviours).
5. ACKNOWLEDGMENTS
We would like to thank the JADE developers team for the great support during our work and all people who contribute to JADE growth by actively participating to the mailing list.
We acknowledge that this work has been partially supported by the Italian M.I.U.R. (Ministero dell’Istruzione dell’Università e della Ricerca) through the Te.S.C.He.T. Project (Technology System for Cultural Heritage in Tourism).
6. REFERENCES
[1] FIPA - Foundation for
Intelligent Physical Agents. http://www.fipa.org.
[2] JADE, Java Agent DEvelopment
framework. http://jade.cselt.it
[3] LEAP, Lightweight Extensible
Agent Platform
http://leap.crm-paris.com/
[4] F.Bellifemine, A.Poggi,
G.Rimassa, P.Turci, “An Object Oriented Framework to Realize Agent System”: Proceedings of WOA 2000 Workshop,
Parma, May 2000, pagg. 52-57.
[5] F. Bellifemine, A. Poggi, G. Rimassa. “Developing Multi-Agent Systems with a
FIPA-compliant Agent Framework”. Software: Practice & Experience,
31:103-128, 2001.
[6] R.Deters, “Scalability &
Multi-Agent Systems”, 2nd International Workshop Infrastructure for
Agents, MAS and Scalable MAS. 5th int.conference on Autonomous
Agents, May-June 2001.
[7]
ORBacus, IONA Techologies, http://www.orbacus.com/
[8]
Niek Wijngaards, Maarten van Steen, Frances
Brazier, “On MAS Scalability”, Proc.2nd Int’l Workshop on Infrastructure
for Agents, MAS and Scalable MAS. May 2001.
[9]
P.J.Turner, N.R.Jennings, “Improving
Scalability of Multi-Agent Systems”, Proc.1st Int’l Workshop
Infrastructure for Scalable Multi-Agent Systems. June 2000.
[10]
O.F.Rana, K.Stout, “What is Scalability in
Multi-Agent Systems”, Autonomous Agents 2000, June’00, ACM Press.
[11]
L.C.Lee,H.S.Nwana,D.T.Ndumu, P De Wilde , “The
stability, scalability and performance of multi-agent Systems”, BT Technol J Vol
16 No 3 July 1998 94
[12]
O.Shehory, “A Scalable Agent Location
Mechanism”, Intelligent Agents VI,
vol.1757 of Lecture Notes in AI, pages.162.172, Springer-Verlang, Berlin,
Germany, 1999
[13]
B.Neuman, “Scale in Distributed Systems”, in
Readings in Distributed Computing Systems, pag.463-489, IEEE Computer Society
Press, Los Alamitos, CA, 1994